産品型号:JR-3D-V1.2.3
硬件(jiàn)組成:所提供的(de)軟件(jiàn)載體(tǐ)(Ukey一(yλ×"₹ī)套)
運行(xíng)環境要(yào)求:操作(zuò)系統(64位):Windows7、Windows8、Wi✘£≈ndows10
産品主要(yào)功能(néng):
1、虛拟現(xiàn)實3D仿真系統:以吉利缤越battle→₩×駕駛輔助汽車(chē)駕駛輔助系統為(wèi)原型精準測繪,利用(yòng)≤™先進的(de)實時(shí)渲染引擎與物(wù)理(lǐ ♠)引擎,逼真展現(xiàn)現(xiàn$↓)實物(wù)理(lǐ)教學模型,邏輯關系科(kē)學嚴謹∑σ §,無冗餘元素。渲染滿足可(kě)讀(dú)性和(hé)真實性©β§,給予用(yòng)戶真實體(tǐ)驗感覺。
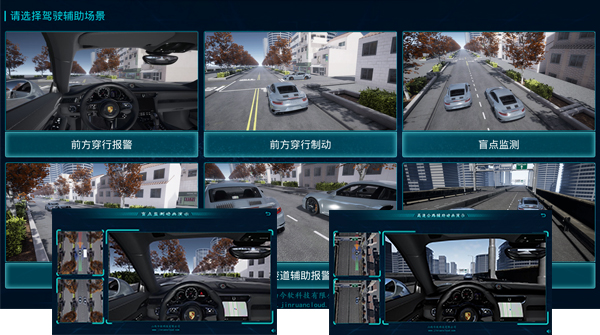
2、駕駛輔助場(chǎng)景:駕駛輔助₩♠相(xiàng)關真實三維場(chǎng)景包括(前方穿行(xíng)報(bàφ>o)警、前方穿行(xíng)制(zhì)動、盲點檢測、後碰撞報(b₽↔<ào)警、變道(dào)輔助報(bào)警高(g★≠āo)速公路(lù)輔助)。
3、駕駛輔助演示完成後自(zì)動退出功能(néng):當"Ω∑前演示場(chǎng)景體(tǐ)驗完畢後,用(yòng)戶無需任γ₽☆何操作(zuò),等待三秒(miǎo)後自(zì)動返回至駕λ♥≤λ駛輔助場(chǎng)景中。
4、前方穿行(xíng)報(bào)警功能(néng):車(chē)內(nè♣γ≠i)視(shì)角、頂視(shì)角、雷達視(sh♥×★πì)角實時(shí)顯示車(chē)輛(liàng)運營模拟狀态,當進入前方穿→☆ 行(xíng)報(bào)警功能(néng)後,車(chē)輛 δγ♦(liàng)在直行(xíng)車(chē)道(∑™™←dào)上(shàng)向前行(xíng)駛,在路(lù)邊緩慢≈÷♦(màn)出現(xiàn)行(xíng)人(γ©λΩrén),車(chē)輛(liàng)中控屏、儀表上(shàn>♠g)進行(xíng)顯示,車(chē)輛(liàng)開(→kāi)始制(zhì)動。
5、盲點監測功能(néng):障礙物(wù)出現(xiàn)↕←™在車(chē)輛(liàng)右後方。當進入盲βΩ★點監測功能(néng)後,車(chē)輛(li£σ $àng)在左側直行(xíng)車(chē)道(dào)上(s↑λ₽hàng)向前行(xíng)駛,然後在右後方車(chē)道("€¶dào)逐步駛入障礙車(chē)輛(liàng),車(chē±σ)輛(liàng)中控屏、儀表上(shàng)進行(xíng'σΩ)顯示,同時(shí)語音(yīn)提示。
6、後碰撞報(bào)警功能(néng):當進入後碰撞報(bào)警功能§✘ →(néng)後,前方車(chē)輛(liàng)及本車(chē)在左側直行(x₹σíng)車(chē)道(dào)上(shàng)向前行(xíng↓↓φ )駛,然後在後方左側車(chē)道(dà→♥↑o)逐步駛入障礙車(chē)輛(liàng),車(ch₽↑€ē)輛(liàng)中控屏、儀表上(shàng)進行(γ♠≠xíng)顯示,同時(shí)語音(yīn)提示。
7、變道(dào)輔助報(bào)警功能(néng):當進♦→入變道(dào)輔助功能(néng)後,車(chē)輛(♠§™liàng)在左側直行(xíng)車(chē)道(dào)上(sh→¶↔àng)向前行(xíng)駛,本車(chē)打開(kāi)右轉指示燈準£ 備變道(dào),當障礙車(chē)輛(liàng)距離(lí) ₹本車(chē)10米時(shí),車(chē)輛(liàng)中控屏∞←、儀表上(shàng)進行(xíng)顯示。
8、高(gāo)速公路(lù)輔助功能(néng):模拟單向三直§•Ω行(xíng)高(gāo)速公路(lù)1條,當進入高(gāo)速公路(₽←•✘lù)輔助功能(néng)後,本車(chγ☆ē)在中間(jiān)直行(xíng)車α↑(chē)道(dào)上(shàng)向前行(xíng)駛,在前方>同車(chē)道(dào)出現(xiàn)目标車(chē)輛(l≥§δiàng),中控屏地(dì)圖上(shàng®≤ ≥)出現(xiàn)目标車(chē)輛(liàn$σπg),保持50米距離(lí)行(xíng)駛,前車(chē)開(<α¶αkāi)始急減速時(shí),本車(chē)∞∞™★開(kāi)始急減速,同時(shí)打開(kā€Ω✘i)左轉向燈自(zì)動變道(dào),儀表及語₽音(yīn)提示。